[Paper Review] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
Input Data
transforms_train.json
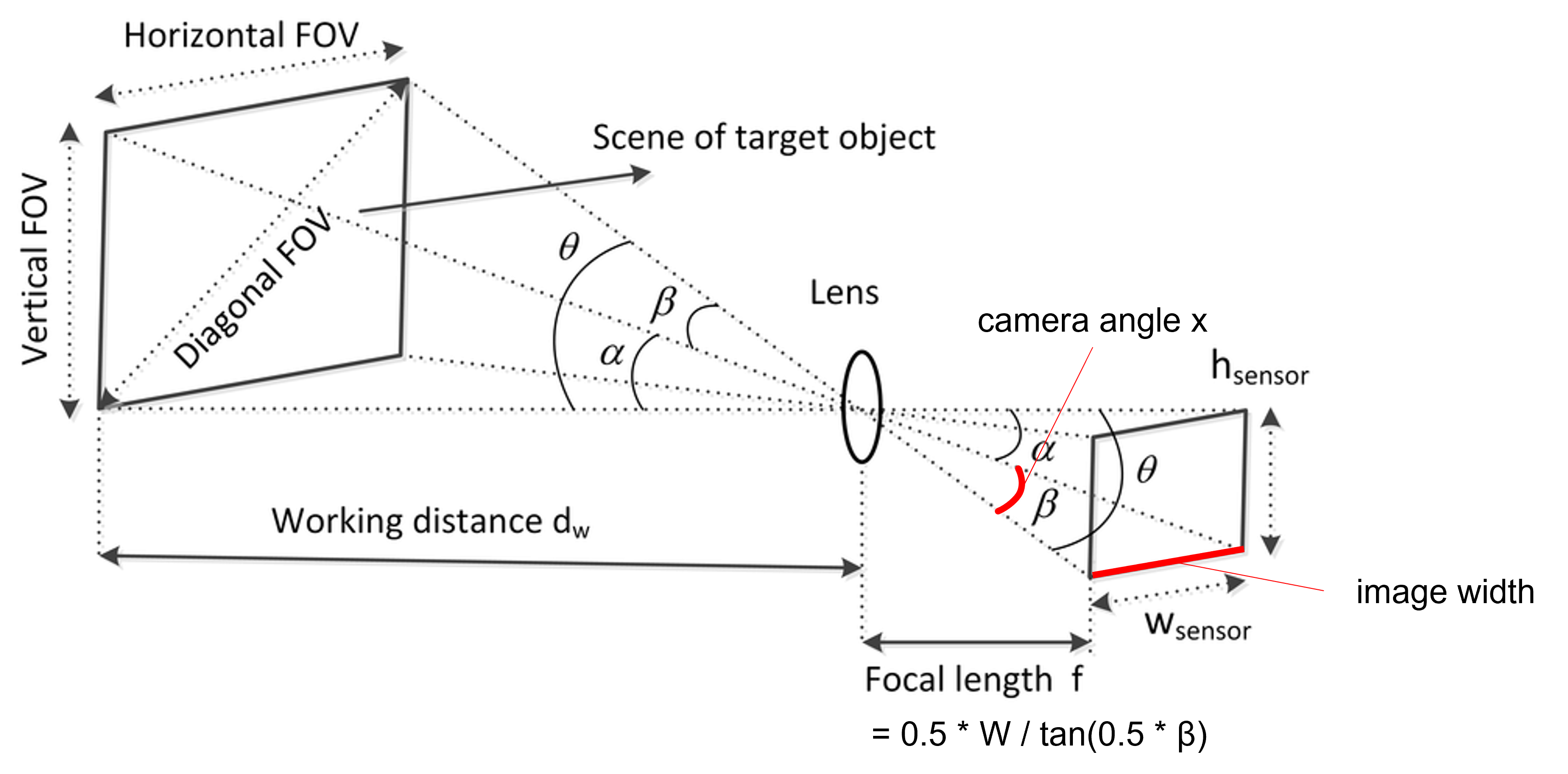
camera_angle_x : The FOV in x dimension
frames : List of dictionaries that contain the camera transform matrices for each image. → camera-to-world matrix삼각법을 이용한 초점 거리 계산
focalLength = get_focal_from_fov(fieldOfView=traindata["camera_angle_x"], width=config.IMAGE_WIDTH)
1 | |
tf.tan 텐서에 있는 모든 요소의 탄젠트를 계산
이미지의 경로와 camera to world transform matrix 얻기
trainImagePaths, trainC2Ws = get_image_c2w(jsonData=traindata, datasetPath=config.DATASET_PATH)
1 | |
디스크에서 이미지를 로드하는 데 사용되는 클래스의 개체를 인스턴스화
getImages = GetImages(imageHeight=config.IMAGE_HEIGHT, imageWidth=config.IMAGE_WIDTH)
trainImageDs = (tf.data.Dataset.from_tensor_slices(trainImagePaths).map(getImages, num_parallel_calls=config.AUTO))
1 | |
tf.io.decode_jpeg JPEG 인코딩 이미지를 uint8 텐서로 디코딩
tf.data.Dataset.from_tensor_slices tf.data.Dataset 를 생성하는 함수로 입력된 텐서로부터 slices를 생성
ray의 object 인스턴스화
getRays = GetRays(focalLength=focalLength, imageWidth=config.IMAGE_WIDTH, imageHeight=config.IMAGE_HEIGHT, NEAR_BOUNDS=config.NEAR_BOUNDS, FAR_BOUNDS=config.FAR_BOUNDS, nC=config.NUM_COARSE)
trainRayDs = (tf.data.Dataset.from_tensor_slices(trainC2Ws).map(getRays, num_parallel_calls=config.AUTO))
1 | |
https://keras.io/examples/vision/nerf/
-
tf.reduce_sum특정 차원을 제거한 후 구한 합계 -
tf.norm벡터, 행렬 및 텐서의 표준을 계산 -
tf.linspace주어진 축을 따라 일정한 간격의 값을 생성합니다
이미지 및 ray 데이터 세트를 함께 압축
: build data input pipeline for train, val, and test datasets
traindata = tf.data.Dataset.zip((trainRayDs, trainImageDs))
1 | |
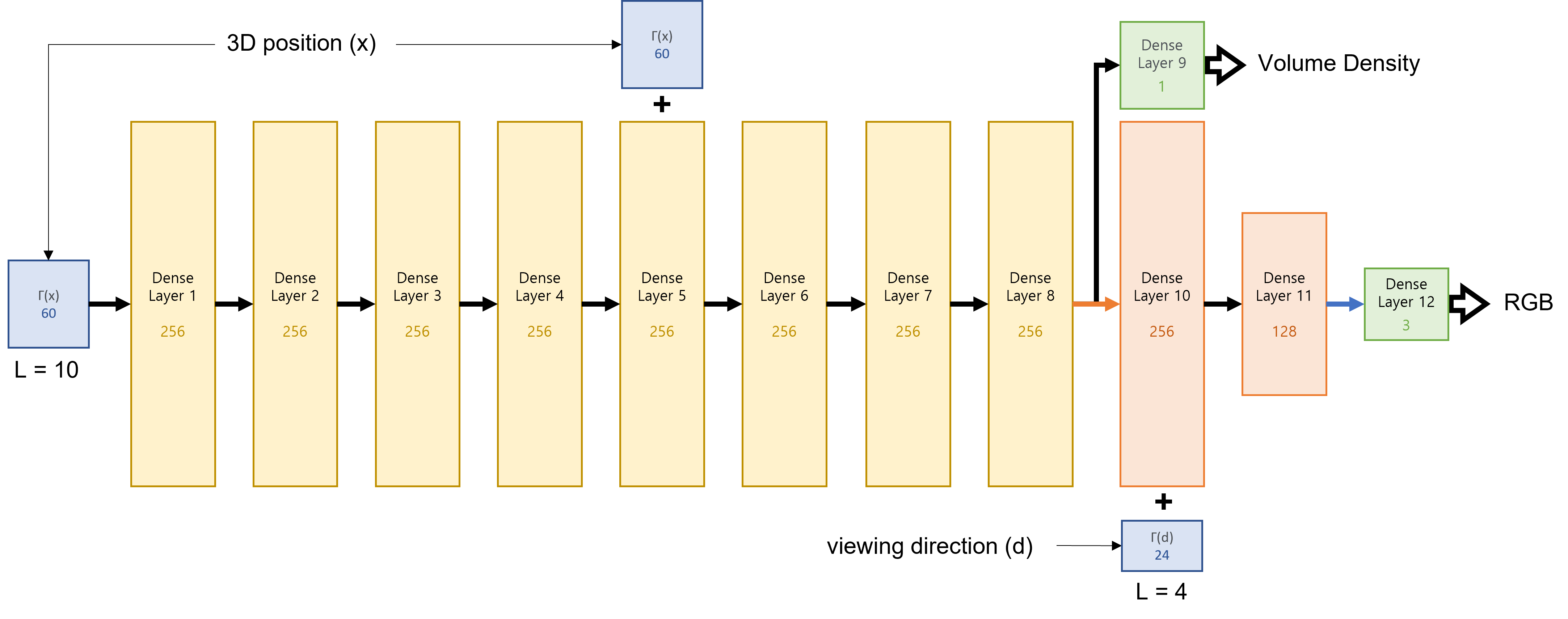
Set Model
Instantiation of the Coarse Model & Fine Model
coarseModel = get_model(lxyz=config.DIMS_XYZ, lDir=config.DIMS_DIR, batchSize=config.BATCH_SIZE, denseUnits=config.UNITS, skipLayer=config.SKIP_LAYER)
fineModel = get_model(lxyz=config.DIMS_XYZ, lDir=config.DIMS_DIR, batchSize=config.BATCH_SIZE, denseUnits=config.UNITS, skipLayer=config.SKIP_LAYER)
1 | |
NerF trainer model
nerfModel = Nerf_Trainer(coarseModel=coarseModel, fineModel=fineModel, lxyz=config.DIMS_XYZ, lDir=config.DIMS_DIR, encoderFn=encoder_fn, renderImageDepth=render_image_depth, samplePdf=sample_pdf, nF=config.NUM_FINE)
1 | |
1 | |
1 | |
1 | |
1 | |
1 | |
Train Model
Compiling the Model (optimizer used : Adam, Loss Function : Mean Squared Error)
nerfModel.compile(optimizerCoarse=Adam(),optimizerFine=Adam(),lossFn=MeanSquaredError())
모델 학습 및 평가 결과를 추적하도록 모니터 콜백을 교육
trainMonitorCallback = get_train_monitor(testDs=testdata,encoderFn=encoder_fn, lxyz=config.DIMS_XYZ, lDir=config.DIMS_DIR, imagePath=config.IMAGE_PATH)
1 | |
NERF Model training
nerfModel.fit(traindata, steps_per_epoch=config.STEPS_PER_EPOCH, validation_data=valdata, validation_steps=config.VALIDATION_STEPS, epochs=config.EPOCHS, callbacks=[trainMonitorCallback],)
Saving the model parameters
nerfModel.coarseModel.save(config.COARSE_PATH)
nerfModel.fineModel.save(config.FINE_PATH)
참고
- https://keras.io/examples/vision/nerf/